|
記事検索 |
イベントレポート |
|
|
||||||||||||||||||||||||||||||||||||
|
被写体を自動検出して撮影する移動ロボットカメラ |
||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||
|
世田谷区砧のNHK放送技術研究所(以下、NHK技研)は、NHK技研を一般に公開する「技研公開2004(以下、技研公開)」を、5月27日から30日にかけて開催している。58回目となる今回の公開では、被写体を自動検出して撮影する移動ロボットカメラや、1,000枚のレンズを使用した3次元映像システム、ミリ波を利用した撮影用モバイルカメラなどが公開された。
● 被写体を自動検出して撮影する移動ロボットカメラ
被写体検出システムを搭載し、モデルの動きを検知。動きに合わせて、パン、チルト、ズーム、フォーカスなどを撮影動作を実行し、同時に最高秒速1mで移動できる。カメラの昇降にはリニアモーターを採用。滑らかで高精度な動きができるという。 今後は、被写体を撮影する際の適切なカメラ位置の決定手法や、複数ロボットの制御方法について研究するとしている。
● 1,000枚のレンズを使って、どんな姿勢でも3D表示が楽しめるインテグラル立体テレビ 「インテグラル立体テレビ」は、微少レンズを多数配置したレンズ版を撮影と表示に使用することで水平だけでなく、全方向に視差を持つ立体映像を再現できる方式「インテグラルフォトグラフィ」を採用した3次元映像システム。通常立体視に必要な専用メガネが不要なのが特徴だ。デモンストレーションでは、1,000枚の微少レンズを敷き詰めたレンズ板を撮影に使用。再生時にもディスプレイ上に同じレンズ板を貼り付けて3D映像を表示していた。ディスプレイから2~3m程度離れた場所で席に座って映像を見るデモとなっており、実際に映像を見る際は着席したのち、頭の位置を上下左右に微調整して、よく見える位置を探る必要があった。
撮影した3D映像データを特殊な処理することで、PCで2D映像としても再生できる。PCに取り込んだ映像は、撮影範囲内で視点を動かすことも可能だ。この2D映像は「Light Field Live with Thousands of Lenslets(LIFLET)」と呼ばれ、入力方式をNHK技研、信号処理や表示を東京大学がそれぞれ担当して研究しているという。
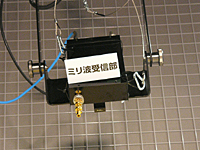
● ミリ波を利用した撮影用モバイルカメラでハイビジョン映像を伝送
今回のデモンストレーションでは、伝送方式に「Multiple-Input Multiple-Output(MIMO)」を採用。複数の送受信アンテナを用いて複数の伝送路を確保する方式で、冗長性が高まり、電波の遮蔽などの妨害要因に強いという。また、伝送信号には、「Orthogonal Frequency Division Multiplexing(OFDM)」方式を採用。床や壁などに電波が複雑に反射しやすいスタジオ内で利用可能なほか、カメラごとに固有の符号を割り当てて、同じ周波数で複数のカメラの使用も可能になっている。
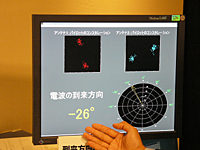
スタッフによれば、「ミリ波の伝送はまだまだ不安定。アンテナに手をかざすだけで映像が途切れる場合がある」という。NHK技研では伝送の安定に向けて、複数のアンテナで受信したOFDM信号の位相差から電波の到来方向を推定する技術を開発している。電波の強い方向へ自動的に受信アンテナを向けて安定した伝送を実現するシステムの実現を目指す。
関連情報 ■URL 技研公開2004 http://www.nhk.or.jp/strl/open2004/ NHK放送技術研究所 http://www.nhk.or.jp/strl/
( 鷹木 創 )
- ページの先頭へ-
|