|
記事検索 |
イベントレポート |
|
|
||||||||||||||||||||
|
アトムのような生活密着型ロボットに必要な「本人認証技術」とは |
||||||||||||||||||||
|
|
||||||||||||||||||||
|
CEATEC JAPAN 2004の2日目に行なわれた「ロボットにおける本人認証技術」と題したセッションでは、システムニーズの中山恵介社長、東京大学工学部の安藤繁教授の2人が、なぜロボットに本人認証技術を導入する必要があるのか、またその要素技術としてはどのようなものがあるのか、といった点について解説を行なった。 ● ロボットに感情を表現させるには本人認証が不可欠~中山氏 前半は中山氏が、生活密着型のロボットを作るためになぜ本人認証が必要かという背景について語った。中山氏はいわゆる産業用ロボットが常に一定の動作を行なうことが求められるのに対し、生活密着型ロボットでは「行動がワンパターンではつまらないため、ある程度感情を持つようなロボットが求められる」と述べた。ロボットがその場に応じた適切な感情表現を行なうためには「誰を相手にしているのか」を識別するだけでなく、顔の表情や声の調子、体の動きなどから「どのような感情なのか」を判断しなくてはいけないと語った。 そうした判断を行なうためには、本人認証のために「対象となる相手の場所を特定する」「対象が物なのか人なのかを判別する」「人であればそれが誰なのかを特定する」という3要素、さらに本人の状況の判断のためには「対象となる人の動きを確実にトレースする」「対象人の感情の動きを検知する」といった要素が求められると述べた。 また、人間を相手に自然なやり取りを行なうには、ある程度のレスポンスの速さも同時に求められると中山氏は語り、「これが実現すれば、人間に近いかわいらしいロボットができるのではないか」と、同氏の夢である「アトムのようなロボットを作る」ために開発を進めていく意気込みを示した。
● ロボットが人間のような視覚・聴覚を得るための課題~安藤氏
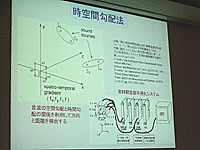
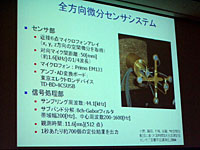
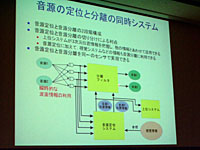
安藤氏はまず「ロボットが人間に身近な存在になるためには、人間がインターフェイスするための『顔』となる部分が明確に存在することが必要であり、少なくとも視覚・聴覚がないと身近な存在にはならない」と語った上で、「一般に『人間の行動の95%は感情で動いている』と言われるが、これまでのユーザー認証技術は残る5%の理性の部分ばかりを追いかけており、残る95%の『動物としての人間』のところをおざなりにしていた」と述べ、本人認証のためには人間の特定だけに限らないベーシックな技術こそが鍵を握るという考えを示した。 その上で解説に力を入れたのが、音が発したことを検知してその音の出た場所を特定する「音源定位」の技術。安藤氏はまず、複数の音源が入り混じる環境下である音源(例えば特定の人の声)だけを聞き分けて認識することができる、いわゆる「カクテルパーティー効果」を引き合いに出して音源定位の重要性を示し「これが実現できれば、人間と同等の聴力は実現できる」と語った。 そこで安藤氏は、同氏が1986年に発表した「時空間勾配法」による音源定位の方法を紹介。同氏によればこの方式は他の方式と比較して「代数計算だけで方程式を一度に解くことが可能なので、DSPで実装を行なう場合に大変有利」という利点があるとのことで、同氏の研究室ではすでにこの理論を元に開発したシステムにより、等距離の場所にある異なる2つの音源の完全同時定位が可能なことを確認しているという。また、ロボットへの実装を考えた場合に必要な、音を集めるために不可欠なマイクの小型化にも取り組んでいるとして、その現状についても説明した。 このように音源定位が可能になったものの、現在の課題は、複数の音源が入り混じる環境で1つの音だけを抜き出して認識する「音源分離」だと安藤氏は語る。現在のところ、2人の人間の音声が混じる環境でそれぞれの人間の声を実時間で分離するフィルタの開発を行なっているということなのだが、シミュレーション上では良好な結果が得られるものの、実環境でテストを行なうと音声の分離が不十分な状態が続いているという。 また、安藤氏は視覚による認証についても、現在の顔認証では「証明の当たり具合など微妙な調整が必要とされるため、なりすましに弱い」という問題があることから、この問題をクリアするための三次元による顔認証技術の開発を行なっていると語った。 安藤氏は最後に、これら各種の技術を組み合わせることで「実用化の方向は十分に考えられるのではないか」と述べ、ロボットに求められる本人認証は近いうちに十分実現が可能との認識を示して講演を締めくくった。
関連情報 ■URL CEATEC JAPAN 2004 http://www.ceatec.com/
( 松林庵洋風 )
- ページの先頭へ-
|